На вопрос «что такое импеданс» я хотел бы отметить, что импеданс является широкой концепцией физики в целом, электрический импеданс которой является лишь одним примером.
Чтобы понять, что это значит и как это работает, зачастую проще рассмотреть механическое сопротивление. Подумайте о попытке протолкнуть (сдвинуть) тяжелую кушетку по полу.
Вы прикладываете определенное усилие, и кушетка скользит с определенной скоростью, в зависимости от того, насколько сильно вы толкаете, веса кушетки, типа поверхности пола, типа ножек кушетки и т. Д. В этой ситуации можно определить механическое сопротивление, которое дает соотношение между тем, насколько сильно вы нажимаете, и тем, как быстро движется кушетка.
Это на самом деле очень похоже на электрическую цепь постоянного тока, где вы прикладываете определенное количество напряжения к цепи, и через нее течет ток с определенной соответствующей скоростью.
В случае кушетки и схемы ответ на ваш вход может быть простым и довольно линейным: резистор, подчиняющийся закону Ома, где его электрический импеданс является просто сопротивлением, а кушетка может иметь ножки ползунка трения, которые позволяют ему двигаться со скоростью, пропорциональной вашей силе. *
Схемы и механические системы также могут быть нелинейными. Если ваша цепь состоит из переменного напряжения, расположенного на резисторе последовательно с диодом, ток будет близок к нулю до тех пор, пока вы не превысите прямое напряжение диода, и в этот момент ток начнет течь через резистор в соответствии с омом закон. Точно так же на кушетке, сидящей на полу, обычно возникает некоторая степень статического трения: она не начнет двигаться, пока вы не нажмете с определенным начальным усилием. Ни в механической, ни в электрической системе нет единого линейного сопротивления, которое можно определить. Скорее, лучшее, что вы можете сделать, это отдельно определить импедансы в различных условиях. (Реальный мир гораздо больше похож на это.)
Даже когда все очень четко и линейно, важно отметить, что импеданс просто описывает отношение - он не описывает границы системы, и это не «плохо». Вы определенно можете получить столько тока / скорости, сколько хотите (в идеальной системе), добавив больше напряжения / толкая сильнее.
Механические системы также могут дать довольно хорошее ощущение импеданса переменного тока. Представь, что ты ездишь на велосипеде. С каждым полупериодом педалей вы нажимаете влево, нажимаете вправо. Вы также можете представить, как крутить педали всего одной ногой и зажимом для пальца на ноге, так что вы нажимаете и тянете с каждым циклом педали. Это очень похоже на подачу переменного напряжения в цепь: вы нажимаете и тянете поочередно, циклически, с определенной частотой.
Если частота достаточно медленная - например, когда вы остановились на велосипеде, проблема нажатия педалей - это просто проблема постоянного тока, например, нажатие на кушетку. Когда вы ускоряетесь, все может действовать по-другому.
Теперь предположим, что вы едете на велосипеде с определенной скоростью, а ваш велосипед - трехскоростной с низким, средним и высоким передаточным числом. Средняя кажется естественной, на высокой передаче сложно приложить достаточную силу, чтобы что-то изменить, а на низкой передаче вы просто вращаете педали, не передавая энергию колесам. Это вопрос согласования импедансов , когда вы можете эффективно передавать мощность на колеса только тогда, когда они оказывают определенное физическое сопротивление вашей ноге - не слишком много и не слишком мало. Соответствующее электрическое явление также очень распространено; вам необходимы согласованные по импедансу линии для эффективной передачи ВЧ-энергии из точки А в точку Б, и каждый раз, когда вы соединяете две линии передачи вместе, на интерфейсе будут некоторые потери.
Сопротивление, оказываемое педалями вашим ногам, пропорционально тому, насколько сильно вы нажимаете, что наиболее тесно связано с простым сопротивлением, особенно на низких скоростях. Даже в цепях переменного тока резистор ведет себя как резистор (до определенной точки).
Однако, в отличие от резистора, сопротивление велосипеда зависит от частоты. Предположим, вы включили свой велосипед на высокой скорости, начиная с остановки. Это может быть очень трудно начать. Но, как только вы начинаете, сопротивление, создаваемое педалями, уменьшается по мере того, как вы движетесь быстрее, и, когда вы едете очень быстро, вы можете обнаружить, что педали обладают слишком малым сопротивлением, чтобы поглощать энергию от ваших ног. Таким образом, в действительности существует частотно-зависимое сопротивление ( реактивное сопротивление ), которое начинается с высокого уровня и становится ниже, когда вы движетесь к более высокой частоте.
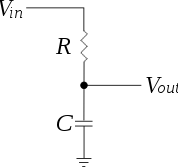
Это очень похоже на поведение конденсатора, и довольно хорошей моделью для механического импеданса велосипеда будет резистор, параллельный конденсатору.
При постоянном токе (нулевая скорость) вы просто видите высокое постоянное сопротивление в качестве импеданса. Когда частота педалирования увеличивается, сопротивление конденсатора становится ниже, чем у резистора, и это позволяет току течь таким образом.
Есть, конечно, различные другие электрические компоненты и их механические аналогии **, но это обсуждение должно дать вам некоторую начальную интуицию об общей концепции, чтобы оставаться на месте (каламбур), когда вы узнаете о математических аспектах того, что иногда может показаться как очень абстрактный предмет.
* Слово к требовательному: закон Ома никогда не бывает точным для реального устройства, а силы трения в реальном мире никогда не дают скорость, точно пропорциональную силе. Однако «довольно линейно» легко. Я пытаюсь быть все образовательным и прочее здесь. Отпусти меня.
** Например, индуктор - это что-то вроде подпружиненного ролика на вашем колесе, который добавляет сопротивление при повышении частоты)